不論是普通制造業還是碼頭倉庫,物料裝卸和搬運都是物流的要素之一,在物流系統中成本占比也很高。美國工業生產過程中裝卸搬運費用占成本的20~30%,德國物流企業物料搬運費用占營業額的35%,日本物流搬運費用占10%,我國生產物流中裝卸搬運費用約占加工成本的20%,所以企業一直都在最完美的自動化智能化的搬運技術和裝備。AGV機器人一種柔性化和智能化物流搬運機器人,在國外從50年代在倉儲業開始使用,目前已經在制造業、港口、碼頭等領域得到普遍應用,在國內逐漸也有部分企業重視并應用AGV來完成一些簡單的搬運任務。下面我們就來簡單分析I-SO智能AGV機器人與現代智能化物流應用。


I-SO AGV的顯著特點是無人駕駛,I-SO AGV上裝備有自動導向系統,可以保障系統在不需要人工引航的情況下就能夠沿預定的路線自動行駛,將貨物或物料自動從起始點運送到目的地。I-SO AGV的另一個特點是柔性好,自動化程度高和智能化水平高,I-SO AGV的行駛路徑可以根據倉儲貨位要求、生產工藝流程等改變而靈活改變,并且運行路徑改變的費用與傳統的輸送帶和剛性的傳送線相比非常低廉。I-SO AGV一般配備有裝卸機構,可以與其他物流設備自動接口,實現貨物和物料裝卸與搬運全過程自動化。此外,I-SO AGV還具有清潔生產的特點,I-SO AGV依靠自帶的蓄電池提供動力,運行過程中無噪聲、無污染,可以應用在許多要求工作環境清潔的場所。
I-SO智能 AGV的種類
AGV從發明至今已經有50年的歷史,隨著應用領域的擴展,其種類和形式變得多種多樣。我們根據I-SO AGV自動行駛過程中的導航方式將AGV分為以下幾種類型:
1). I-SO電磁感應引導式AGV (由于這種技術相對落后和性能缺陷,一般環境下I-SO智能 AGV很少采用)
電磁感應式引導一般是在地面上,沿預先設定的行駛路徑埋設電線,當高頻電流流經導線時,導線周圍產生電磁場,AGV上左右對稱安裝有兩個電磁感應器,它們所接收的電磁信號的強度差異可以反映AGV偏離路徑的程度。AGV的自動控制系統根據這種偏差來控制車輛的轉向,連續的動態閉環控制能夠保證AGV對設定路徑的穩定自動運行。由于這種電磁感應引導式導航方法才安裝施工比較繁雜無法隨時更新AGV行駛路徑,同時容易受到電磁環境干擾,目前部分國內AGV制造廠商仍在商業化的AGV上使用,尤其是適用于大中型的AGV。 2). I-SO激光引導式AGV (適合高附加值,高環境要求行業生產制造使用)
I-SO激光引導式AGV上安裝有可旋轉的激光掃描器,在運行路徑沿途的墻壁或支柱上安裝有高反光性的定位標志,AGV依靠激光掃描器發射激光束,然后接受由四周定位標志反射回的激光束,車載計算機計算出車輛當前的位置以及運動的方向,通過和內置的數字地圖進行對比來校正方位,從而實現自動搬運。
目前I-SO激光引導式AGV的應用范圍普遍,并且依據同樣的引導原理,若將激光掃描器更換為紅外發射器或超聲波發射器,則激光引導式AGV可以變為紅外引導式AGV和超聲波引導式AGV。 I-SO激光引導式AGV成本較高,在普通制造業較少推薦,適合生化制藥,煙草,芯片等高附加值行業使用。
3. I-SO視覺引導式AGV (全力研發中….)
I-SO視覺引導式AGV 是我們正在快速發展和成熟的AGV,該AGV上裝有CCD攝像機和傳感器,在車載計算機中設置有AGV欲行駛路徑周圍環境圖像數據庫。AGV行駛過程中攝像機動態獲取車輛周圍環境圖像信息并與圖像數據庫進行比較,從而確定當前位置并對下一步行駛做出決策。 這種AGV由于不要求人為設置任何物理路徑,因此在理論上具有最佳的引導柔性,隨著計算機圖像采集、儲存和處理技術的飛速發展,能夠識別物品和行人(如盤子.碗.顧客)該種AGV的實用性越來越強。
4).I-SO磁帶導引AGV (通用型,適合所有行業使用)I-SO磁帶導引AGV 在工作區間地板上鋪設磁帶,AGV通過磁場傳感器檢測磁帶信號控制走行,這種技術目前成本最低,施工簡單可快速更改路徑,不受環境影響可靠性高,可滿足大部分行業要求,I-SO磁帶導引AGV 在站點設置上突破了傳統技術自主開發了AGV專用RFID隱藏式站標和讀寫器,讓行駛線路設置更加柔性。
此外,還有鐵磁陀螺慣性引導式AGV、光學引導式AGV等多種形式的AGV。

二 AGV的應用
1.倉儲業
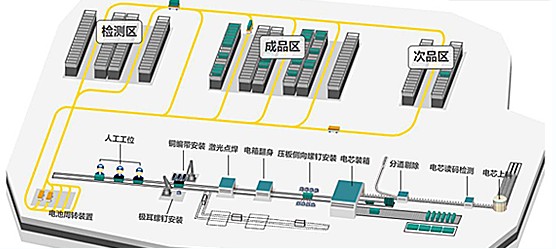
2.制造業
3.郵局、圖書館、港口碼頭和機場
4.煙草、醫藥、食品、化工
5.危險場所和特種行業
I-SO智能 AGV使用中的路線優化和實時調度的方法和研發方向:
1. 數學規劃方法 :為AGV選擇最佳的任務及最佳路徑,可以歸納為一個任務調度問題。數學規劃方法是求解調度問題最優解的傳統方法,該方法的求解過程實際上是一個資源限制下的尋優過程。實用中的方法主要有整數規劃、動態規劃、petri方法等。在小規模調度情況下,這類方法可以得到較好的結果,但是隨著調度規模的增加,求解問題耗費的時間呈指數增長,限制了該方法在負責、大規模實時路線優化和調度中應用。
2. 仿真方法:仿真方法通過對實際的調度環境建模,從而對AGV的一種調度方案的實施進行計算機的模擬仿真。我們使用仿真手段對某些調度方案進行測試、比較、監控,從而改變和挑選調度策略。實用中采用的方法有離散事件仿真方法、面向對象的仿真方法和3維仿真技術,有許多軟件可以用于AGV的調度仿真,其中Witness軟件可以快速建立仿真模型,實現仿真過程三維演示和結果的分析處理。
3. 人工智能方法:人工智能方法把AGV的調度過程描述成一個在滿足約束的解集搜索最優解的過程。它利用知識表示技術將人的知識包括進去,同時使用各種搜索技術力求給出一個令人滿意的解。具體的方法有專家系統方法、遺傳算法、啟發式算法、神經網絡算法。其中專家系統方法在實用中較多采用,它將調度專家的經驗抽象成系統可以理解和執行的調度規則,并且采用沖突消解技術來解決大規模AGV調度中的規則膨脹和沖突問題。
由于神經網絡具有并行運算、知識分布存儲、自適應性強等優點,因此,它成為求解大規模AGV調度問題是一個很有希望的方法。目前,用神經網絡方法成功的求解了TSP-NP問題,求解中,神經網絡能把組合優化問題的解轉換成一種離散動力學系統的能量函數,通過使能量函數達到最小而求得優化問題的解。
遺傳算法是模擬自然界生物進化過程中的遺傳和變異而形成的一種優化求解方法。遺傳算法在求解AGV的優化調度問題時,首先通過編碼將一定數量的可能調度方案表示成適當的染色體,并計算每個染色體的適應度(如運行路徑最短),通過重復進行復制、交叉、變異尋找適應度大的染色體,即AGV調度問題的最優解。
單獨用一種方法來求解調度問題,往往存在一定的缺陷。目前,將多種方法進行融合來求解AGV的調度問題是一個研究熱點。如,將專家系統和遺傳算法融合,把專家的知識融入到初始染色體群的形成中,以加快求解速度和質量。
價格:面談

價格:面談

價格:面談

價格:面談
“一帶一路”背景下,物流裝備企業的全球化發展 01月01日 08:00

解讀汽車物流全局數字化 08月16日 14:11

“大數據與智慧物流”專題報道 12月06日 14:24

2017年中國零售電商十大熱點事件點評 12月11日 16:35

供應鏈協同、互聯網+,中國制造業轉型的十個方向! 01月11日 10:42

預判:2018年,中國快遞十個可見趨勢 02月28日 11:16

2018年關于零售的18個趨勢 03月27日 10:51